KYAC311系列机身采用高精铝合金型材,封闭式无风扇设计,外形紧凑美观,有效防止灰层进入,保障产品在严苛工业场景应用的可靠性和使用寿命。
| 配置 | KYAC311-E3MA | |
| 硬件配置 | ||
| CPU | Intel? Celeron J1900, 2.0GHz, 4 核/4 线程, 2MB L2 缓存 | |
| TDP | 10W | |
| BIOS | AMI UEFI 64Mbit | |
| 内存 | 8GB DDR4 | |
| 存储 | 128GB SSD mSATA | |
| USB | 1 x USB3.0, 3 x USB2.0 板载内置1个USB2.0 可安装硬件加密狗 |
|
| COM | 2 x COM (DB9 公头) 可通过拨动开关配置 RS232 或RS485 模式,RS485 支持自动流控, RS232 带有ESD 防护( 空气放电:±8KV, 接触放电:±6KV) | |
| 以太网 | 2 x Intel I210千兆网口 | |
| DVI-D | 最高分辨率 1920 x 1080 | |
| 扩展接口 | 1 x 全尺寸miniPCIe卡槽,带有SIM卡槽 | |
| 看门狗 | 1~255级可编程设置 | |
| 软件配置 | ||
| 实时环境 | Codesys RTE 3.5.18 | |
| 操作系统 | Windows 10 | |
| 电源 | ||
| 输入电压 | DC12~24V ±10%, 过流、过压以及防反接保护 | |
| 电源功耗 | 最大功耗 45W | |
| 机械参数 | ||
| 结构 | 钣金结构,无风扇,支持壁挂式安装或DIN-Rail导轨安装 | |
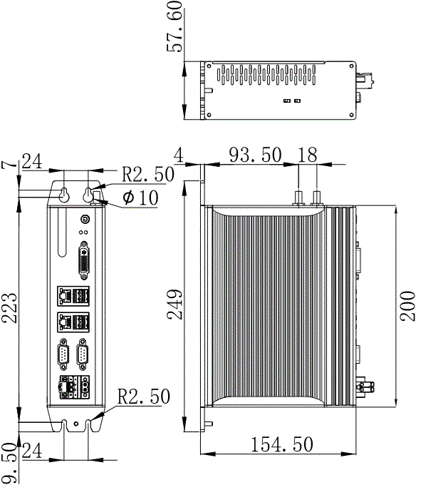
| 尺寸 | 57.6mm x 200mm x 154.5mm (W x H x D) | |
| 净重 | 1.6Kg | |
| 环境 | ||
| 工作温度 | -20?C ~ 60?C | |
| 存储温度 | -40?C ~ 80?C | |
| 相对湿度 | 5~95% 无凝露 | |
| 振动 | 5~500Hz, 1.5Grms,IEC60068-2-64 | |
| 冲击 | 20G( 持续时间11ms,半正弦波),IEC60068-2-27 | |
| EMC | CE/FCC Class A | |
● SM(Softmotion) 该版本提供SMC_Basic库,符合PLCopenl认证标准Part 1及Part 2部分,可以控制单轴或者两个轴(电子凸轮和齿轮)的主从运动。
● CN(CNC+Robotic) 该版本在SMC_Basic库基础上增加了SMC_CNC及SMC_Robotic,支持了CNC应用及机器人应用。可实现CNC数控开发及机器人轴组开发。
● TW(Target & Web Visu) 该版本包含了集成化的可视化编辑器,可以在开发环境中直接创建专业的可视化界面。其中TargetVisu方式直接显示在控制器的内置或外置显示器上;WebVisu方式支持在Web浏览器中浏览界面。
| SM(Softmotion) | CN(CNC+Robotic) | ||||
| 点位运动 | 位置比较触发 | 两轴椭圆插补 | 三轴椭圆插补 | 路径预处理功能 | 两轴串联(SCARA)机器人模型 |
| JOG运动 | 位置捕获 | 两轴样条曲线 | 三轴样条曲线 | 五轴加工模型 | 三轴串联(SCARA)机器人模型 |
| 速度运动 | 回零运动 | 两轴抛物线运动 | 三轴抛物线运动 | 两轴龙门功能 | 并联(DELTA)机器人模型 |
| 电子齿轮 | 间隙捕获 | 两轴直线插补 | 三轴螺旋线插补 | 三轴龙门 | 四轴码垛机器人模型 |
| 电子凸轮 | 两轴圆弧插补 | DXF转G代码功能 | T型龙门 | 六轴关节机器人模型 | |
| 连续轨迹运动 | 三轴直线插补 | G代码/M代码功能 | H型龙门 | ||
| 切向跟随 | 三轴圆弧插补 | 坐标系转换 | 极坐标系模型 | ||
| 产品型号 | 详情 |
| KYAC311-E3MAW0SM | J1900/8G/128G SSD/WIN10/Softmotion |
| KYAC311-E3MAW0SMTW | J1900/8G/128G SSD/WIN10/Softmotion/Target & Web Visu |
| KYAC311-E3MAW0CN | J1900/8G/128G SSD/WIN10/CNC |

